Описание
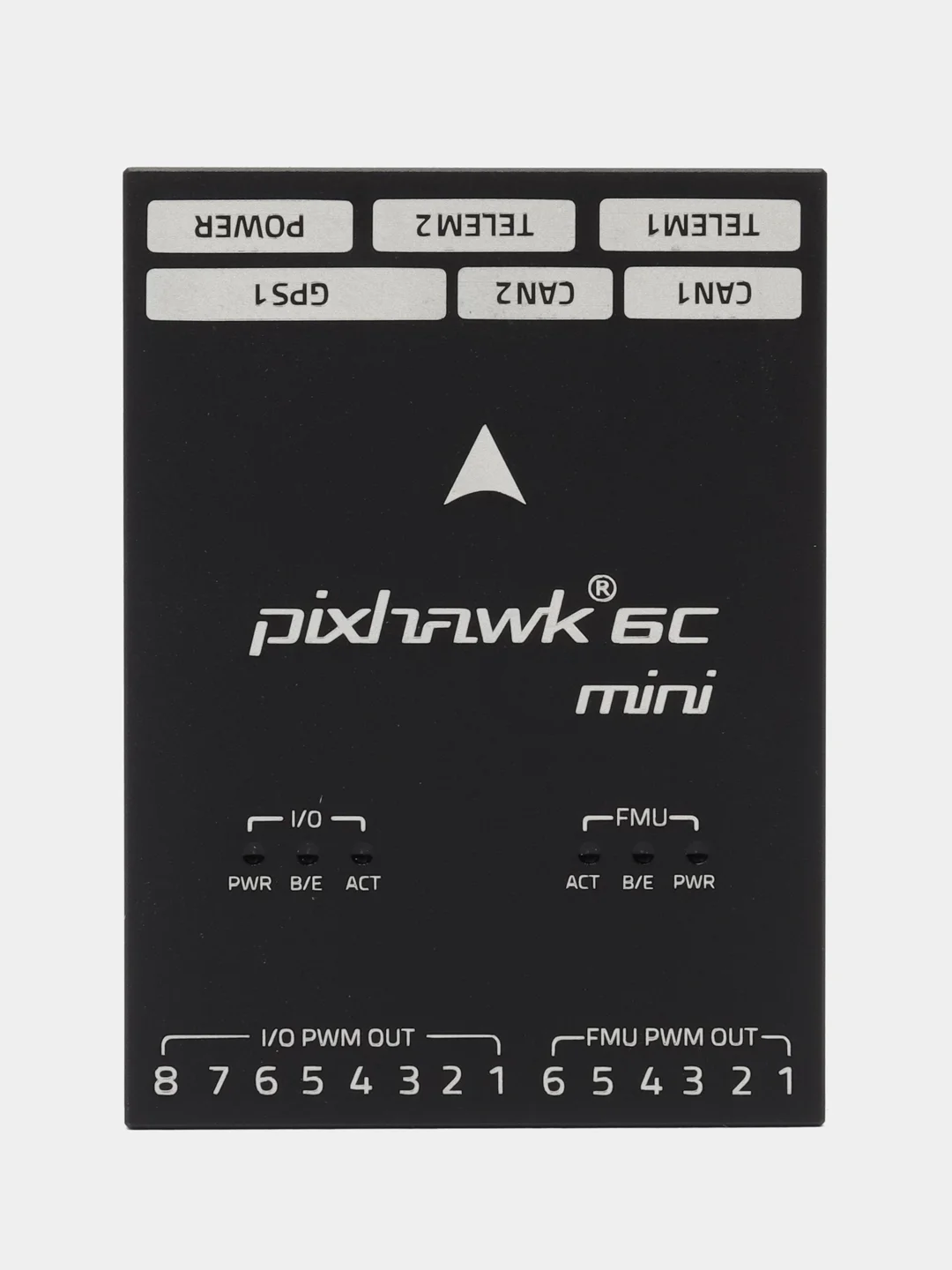
Pixhawk 6C Mini
Описание товара:
Pixhawk 6C Mini — это новейшая версия успешной линейки полётных контроллеров Pixhawk, основанная на открытых стандартах Pixhawk FMUv6C Open Standard и Connector Standard. Он оснащён тем же микропроцессором STMH743 и датчиками, что и стандартная версия Pixhawk 6C. В отличие от стандартной версии, Pixhawk 6C Mini имеет встроенный PWM-разъём, а некоторые порты удалены для соответствия миниатюрному формату.
Внутри Pixhawk 6C Mini находится микропроцессор STM32H743 от STMicroelectronics, в сочетании с датчиками от Bosch и InvenSense, что обеспечивает гибкость и надёжность управления любым автономным транспортным средством, подходящим как для академических, так и для коммерческих приложений.
Микроконтроллер Pixhawk 6C Mini H7 содержит ядро Arm Cortex-M7 с частотой до 480 МГц, 2 МБ флэш-памяти и 1 МБ оперативной памяти. Благодаря обновленной вычислительной мощности, разработчики могут быть более продуктивными и эффективными в своей работе, что позволяет использовать сложные алгоритмы и модели.
Стандарт FMUv6C включает высокопроизводительные, низкошумные IMU, обеспечивающие экономичность и отказоустойчивость. Система виброизоляции фильтрует высокочастотные вибрации и снижает шум, обеспечивая точные показания, что позволяет улучшить общие лётные характеристики.
Pixhawk 6C Mini идеально подходит для разработчиков в корпоративных исследовательских лабораториях, стартапах, академических кругах (исследования, преподаватели, студенты) и для коммерческого использования.
Основные характеристики:
- Высокопроизводительный процессор STM32H743 с большей вычислительной мощностью и оперативной памятью
- Новая экономичная конструкция в малом форм-факторе
- Резервирование IMU с использованием датчиков от Bosch и InvenSense
- Встроенная система виброизоляции для фильтрации высокочастотных вибраций и снижения шума, что обеспечивает точные показания
- Контролируемая температура IMU с помощью встроенных нагревательных резисторов для обеспечения оптимальной рабочей температуры
Процессоры и датчики:
- FMU процессор: STM32H743
- 32-битное ядро Arm Cortex-M7, 480 МГц, 2 МБ памяти, 1 МБ SRAM
- IO процессор: STM32F103
- 32-битное ядро Arm Cortex-M3, 72 МГц, 64 КБ SRAM
- Встроенные датчики:
- Акселерометр/Гироскоп: ICM-42688-P
- Акселерометр/Гироскоп: BMI055
- Магнитометр: IST8310
- Барометр: MS5611
Электрические характеристики:
- Напряжение:
- Максимальное входное напряжение: 6 В
- Вход питания по USB: 4.75~5.25 В
- Вход рельса серво: 0~36 В
- Ток:
- Ограничитель максимального выходного тока Telem1: 1 А
- Ограничитель общего выходного тока всех остальных портов: 1 А
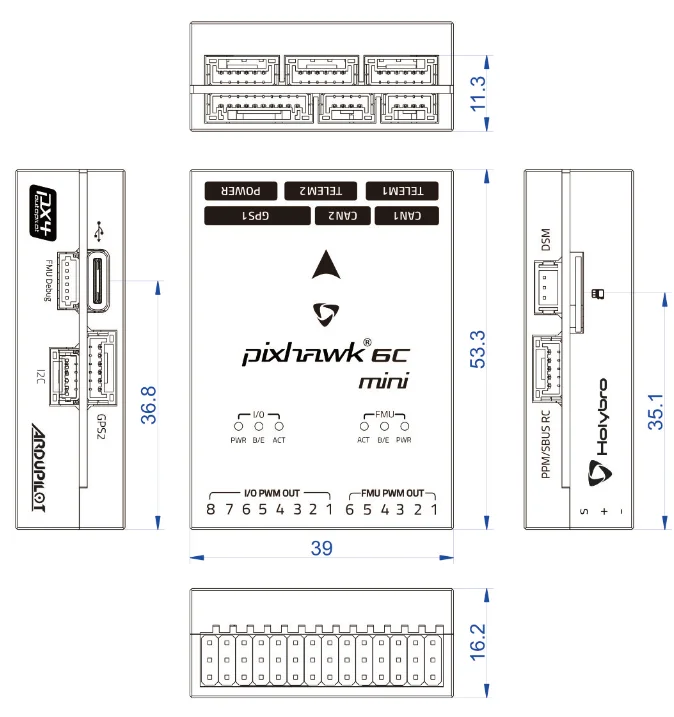
Механические данные:
- Размеры: 53.3 × 39 × 16.2 мм
- Вес: 39.2 г
Интерфейсы:
- 14 PWM-выходов для сервоприводов (8 от IO, 6 от FMU)
- 2 универсальных последовательных порта
- Telem1: Полный контроль потока, отдельное ограничение тока 1.5 А
- Telem2: Полный контроль потока
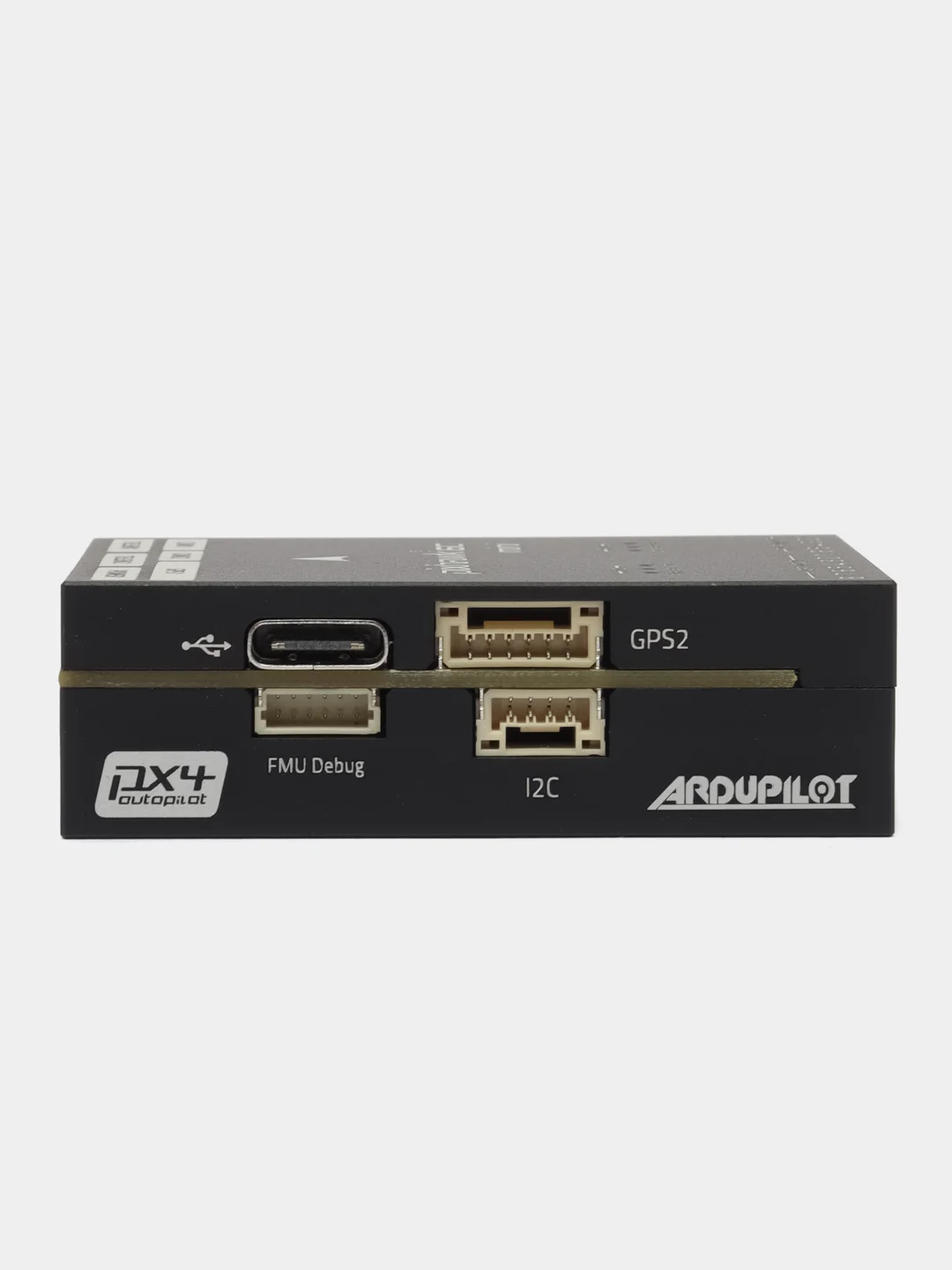
- 2 порта GPS
- GPS1: Полный порт GPS (GPS плюс аварийный выключатель)
- GPS2: Базовый порт GPS
- 1 порт I2C
- Поддерживает выделенную EEPROM для калибровки I2C, расположенную на модуле датчика
- 2 шины CAN
- Отладка FMU (Pixhawk Debug Mini)
- Специальный вход для RC для Spektrum/DSM и S.BUS, CPPM, ADC/PWM RSSI
- 1 порт входа питания (ADC)
Другие характеристики:
- Рабочая температура: -40 ~ 85 °C